1.1 引言
在三维测量系统中,物体的空间位置、形状等几何信息是从摄像机获取的图像中得到的。为了获取空间点到摄像机图像像素点的对应关系,摄像机的标定是不可或缺的。因此,三维测量系统标定的重要内容就是摄像机标定。
1.2 实验目的
1)了解主动双目立体视觉三维测量原理及其系统结构。
2)了解基于平面标定靶的摄像机标定原理,掌握主动双目立体视觉三维测量系统的标定方法。
3)了解主动双目立体视觉三维测量系统的标定原理。
1.3 实验原理
(a) (b)
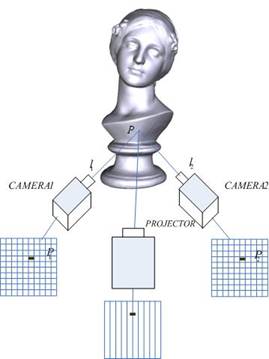
图1-1条纹投影结合立体视觉技术的三维测量系统(a)示意图 (b)测量流程图
图1-1(a)为实验装置示意图。该系统由两台CMOS摄像机和一台投影仪组成。两台摄像机对称地架设在投影仪两侧。其基本工作原理如下:该系统通过标定技术首先对摄像机进行建模,利用标定出的摄像机的内部参数和外部参数,建立空间物体表面三维点与摄像机采集图像平面二维点的对应关系;然后利用投影装置将一组具有不同空间频率且相移的正弦条纹投射到物体表面,同时用摄像机从不同的角度采集携带高度信息的变形条纹图,通过解码变形条纹图可以获得与深度图像对应的绝对相位分布;将绝对相位作为空间三维点的标志,来查找三维点![]() 在双摄像机成像面上二维的对应点
在双摄像机成像面上二维的对应点![]() ,结合标定得到的两摄像机参数和几何参数,最终得到物体表面
,结合标定得到的两摄像机参数和几何参数,最终得到物体表面![]() 点的高精度三维数据。
点的高精度三维数据。
图1-2摄像机成像模型
摄像机的理想透视成像模型如图1-2所示,图中![]() 点为成像透视点,XIOIYI为像平面。由几何光学原理可知,来自物体M’的光线一定通过透视中心OC,而在像平面形成像点m’。从原理图上可以看出,像平面上一点对应着空间中过透视点的一条直线。 其中,OCXCYCZC为摄像机坐标系,OIXIYI为摄像机图像坐标系,OWXWYWZW为物空间的世界坐标系。OCZC垂直像平面XIOIYI,交点为OI。
点为成像透视点,XIOIYI为像平面。由几何光学原理可知,来自物体M’的光线一定通过透视中心OC,而在像平面形成像点m’。从原理图上可以看出,像平面上一点对应着空间中过透视点的一条直线。 其中,OCXCYCZC为摄像机坐标系,OIXIYI为摄像机图像坐标系,OWXWYWZW为物空间的世界坐标系。OCZC垂直像平面XIOIYI,交点为OI。
世界坐标系下一点![]() 用4维齐次坐标
用4维齐次坐标![]() 表示,
表示,![]() 在图像上的对应点
在图像上的对应点![]() 被表示成3维齐次坐标形式
被表示成3维齐次坐标形式![]() ;
;![]() 表示3×4齐次摄像机投影矩阵。则成像过程可表示为:
表示3×4齐次摄像机投影矩阵。则成像过程可表示为:
![]() (1-1)
(1-1)
其中![]() 为尺度因子,
为尺度因子,![]() 包含了从世界坐标到摄像机坐标的变换以及从摄像机坐标到图像坐标的变换矩阵,它可以分解为:
包含了从世界坐标到摄像机坐标的变换以及从摄像机坐标到图像坐标的变换矩阵,它可以分解为:
![]() (1-2)
(1-2)
矩阵![]() 为摄像机标定矩阵,其具体表达是:
为摄像机标定矩阵,其具体表达是:
 (1-3)
(1-3)
![]() 和
和![]() 被称为等效焦距,
被称为等效焦距,![]() 和
和![]() 是主点,
是主点,![]() 成为扭曲因子。在CMOS摄像机中
成为扭曲因子。在CMOS摄像机中![]() 表示CMOS阵列的像素元素产生扭曲使得图像坐标轴不互相垂直,这对于现代的半导体生产工艺来说已是不大可能的,因此
表示CMOS阵列的像素元素产生扭曲使得图像坐标轴不互相垂直,这对于现代的半导体生产工艺来说已是不大可能的,因此![]() 值通常可以忽略。
值通常可以忽略。![]() 中
中![]() 和
和![]() 分别表示从世界坐标到摄像机坐标的旋转和平移。另外,由于实际的摄像机成像系统并非理想的成像系统,像面上图像存在成像畸变,使得空间点在图像上的实际成像位置与理想位置不一致,因此需建立摄像机的畸变模型。通常摄像机畸变主要有径向畸变、离心畸变。
分别表示从世界坐标到摄像机坐标的旋转和平移。另外,由于实际的摄像机成像系统并非理想的成像系统,像面上图像存在成像畸变,使得空间点在图像上的实际成像位置与理想位置不一致,因此需建立摄像机的畸变模型。通常摄像机畸变主要有径向畸变、离心畸变。
双目立体视觉系统的标定原理如图1-3所示。图中两个四边形表示两台摄像机的图像平面,带有圆阵列的四边形表示标定靶,作为标定的参考面。为了计算两台摄像机之间的位姿关系,需利用上一步两台摄像机的标定结果。
假设该系统中左侧摄像机的外部参数为![]() ,右侧摄像机的外部参数为
,右侧摄像机的外部参数为![]() ,那么
,那么![]() 与
与![]() 分别描述了两台摄像机相对于标定靶的位置。在系统标定过程中,将位于标定靶中心处的圆的圆心作为世界坐标系的原点。因此,
分别描述了两台摄像机相对于标定靶的位置。在系统标定过程中,将位于标定靶中心处的圆的圆心作为世界坐标系的原点。因此,![]() 与
与![]() 也表示左右两摄像机相对于世界坐标系的位置关系。
也表示左右两摄像机相对于世界坐标系的位置关系。
若空间任意一点在世界坐标系,左右摄像机坐标系下的非齐次坐标分别为![]() ,则
,则
![]() (1-4)
(1-4)
![]() (1-5)
(1-5)
消去![]() ,得到
,得到![]() 。因此,两台摄像机之间的几何关系
。因此,两台摄像机之间的几何关系![]() 可用以下关系表示:
可用以下关系表示:
![]() (1-6)
(1-6)
![]() (1-7)
(1-7)
这样,便得到某一场景下的两台摄像机之间的位置关系。
图1-3双目立体视觉三维系统标定示意图
1.4实验仪器
CMOS摄像机、定焦镜头、三维测量仪主机、三角架、标定板、光学动态三维测量软件
 |
|
|

图1-4三维测量仪正视图
1.5实验步骤
1)调整扫描仪水平和垂直角度。
2)根据选择的扫描范围调整扫描仪测量距离,让投影仪投射出来的光正好覆盖标定板的靶面,以便后续标定过程中,能够一次采集靶面上的所有圆点。
3)调整投影仪镜头的焦距
调整投影仪镜头前要首先启动扫描模块,打开软件界面。投射测试图片至白纸上(或标定版背面上),调整投影模块镜头焦距使测试图片中的文字调至最清晰。
4)调整两摄像机镜头的焦距
在软件中启动左右摄像机,让摄像机拍摄到投影模块投出的图案。调整摄像机镜头焦距,让摄像机拍到的字最清晰。
5)调整两摄像机位置和夹角
将摄像机的固定螺丝松开即可调整摄像机夹角,让两个摄像机的光心与投影模块光心之间的距离相等。调整后左右摄像机的十字线与投射出来的十字亮线基本重合。
6)调整两摄像机镜头光圈
调整摄像机镜头光圈时左右摄像机曝光时间(亮度)默认值为60,增益8。让投影模块投射正弦光栅图案,调整光圈使条纹不会过曝;且当投射白光时,物体清晰可见。
1)打开软件,同时将标定靶放置在视场中央,通过软件调整标定靶,保证左右两侧摄像机能够同时采集所有的圆。
2)在菜单栏的“系统标定”选项中选择“靶图采集”。
3)根据提示,进行标定数据采集。实验一共需要进行六次采集,每次采集必须保证所有特征点能够被左右两侧摄像机同时采集。
4)采集完毕,选择“双目系统标定” 进行摄像机及系统标定。
5)计算完毕后,点击“确定”完成标定。
1.6 思考题
在对双目立体视觉三维测量系统的标定过程中,主要标定系统的哪些参数,其物理含义分别是什么?
答:主要标定摄像机的内部参数以及两台摄像机之间的外部参数。摄像机内部参数主要是:摄像机焦距,摄像机的主点坐标,镜头的畸变系数。两台摄像机的外部参数主要是旋转矩阵和平移矩阵。这两个矩阵用来描述两台摄像机之间的位姿关系。

网友评论 已有 0 条评论,查看更多评论»