1. 引言
位置与角度测量是计量科学的重要组成部分随着生产和科学的不断发展,位置与角度测量越来越广泛地应用于机械、光学、航空、航天、航海等各个领域,技术水平和测量准确度也不断提高。国内外许多部门和研究机构相继研制出各种仪器,以满足各种需要。非接触式的位置与二维小角度精密测试技术,由于其具有较高的准确度和测量分辨率,在航天航海和国防技术中具有广泛地应用前景。本实验介绍利用氦氖激光器作为光源,以高灵敏度的四象限硅光电探测器作为检测元件的结构小巧的平面位移与小角度检测装置及其测试方法。
2. 实验目的
a.理解四象限原理,掌握四象限光电探测器测量方法。
b.掌握激光传播特性的主要参数的测量方法。
c.加深激光器物理概念的理解,掌握模式分析的基本方法。
d.理解激光光束特性,学会光路准直调整。
e.了解激光器的偏振特性,掌握激光偏振测量方法。
3. 实验原理
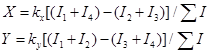
a.二维小角度测量
氦氖激光器发出的光经准直后变为平行光,然后由会聚透镜经偏振分光棱镜、1/4波片变成圆偏振光后,聚焦到平面反射镜上。反射光沿原路返回,经1/4波片后圆偏振光变成线偏振光入射到偏振分光棱镜上,该光不再返回激光器,而是由偏振分光棱镜反射出去,成像在四象限光电探测器上。

二维小角度测量光路
b.四象限硅光电探测器
四象限硅光电探测器如图所示。当光照射到四象限上时,四个硅光电管产生的电流分别为:I1、I2、I3和I4,因此可用四象限加减法来求得光斑的空间位置,即光斑中心(X,Y):
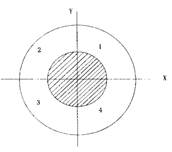
式中![]()
![]() 和
和![]() ——常数因子,和四象限硅光电探测器的孔径大小有关
——常数因子,和四象限硅光电探测器的孔径大小有关
在实际系统中,kx、ky的选取应使(X,Y)的最大值在四象限硅光电探测器的边缘。利用四象限加减法得到的光斑的位置偏移量与光斑中心实际位置并非成完全线性关系,其线性程度与光斑大小有关。光斑的增大将使光斑的位置偏移量与光斑中心实际位置曲线斜率变缓,但其线性区域较宽。综合考虑各种因素,当四象限光敏面的半径为R,光斑半径为r时,应取r=R/2。
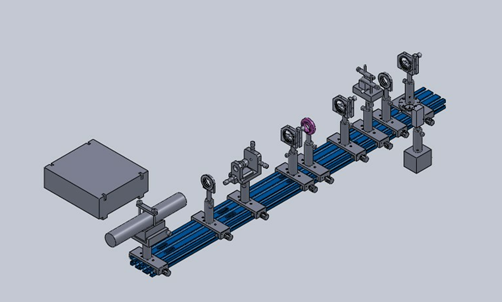
c.测试原理
如图所示,当反射镜有一角位移a时,从反射镜回来的光成像在四象限探测器上,有一偏移量S,偏移量S与反射镜的角位移a有如下关系:
![]()
式中 ![]() ——反射镜偏转角
——反射镜偏转角
![]() ——像位移
——像位移
![]() ——反射镜到探测器的距离
——反射镜到探测器的距离
通过测量光斑图像在四象限探测器上的二维位移,可求得相应的二维偏转角。

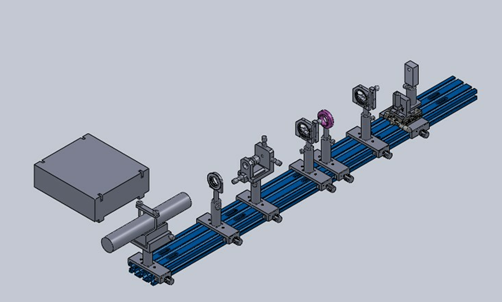
c.位置测量
位置测量只需在二维小角度测量光路的基础上,用探测器代替反射镜的位置。如图所示:

4. 实验仪器
氦氖激光器、四象限探测器、偏振分光棱镜、偏振片、1/4波片、空间滤波器、精密平移台、导轨支杆等。
5. 实验步骤
位置测量
步骤1、按如下光路图搭建实验光路。
步骤2、调整氦氖激光器输出光与导轨面平行且居中,使用可变光阑作为高度标志物用来调整激光器与导轨的面的平行。保持此小孔光阑高度不变,做为后续调整标志物。
步骤3、将各光学器件放置在激光器出光口处,调整各器件中心高与激光等高。
步骤4、调整空间滤波器,在调整空间滤波器之前,先去掉针孔,用可变光阑作为高度标志物,当物镜出射的光斑中心目视与小孔光阑对齐时,调节完毕。放入小孔光阑,推动物镜旋钮靠近小孔,推动过程中,不断调整小孔位置使得透射光斑最亮,光通过滤波器后检查射出的光点是最亮的,无衍射条纹,光斑变得均匀时,说明已经调好。
步骤5、使用f=100mm的平凸透镜将激光光束准直,光斑在远近处直径一致时,认为光束准直完成。
步骤6将可变光阑放置在准直光束后,滤除光束边缘(使可变光阑的圆孔直径为4mm)。
步骤7、放置f=175mm的平凸透镜,确认其中心与其他光学元件中心同轴。
步骤8、在焦点前放置四象限探测器,调整探测器的位置使光斑在探测器屏中央处(注:把探测器的屏放在焦点之前,光斑直径为4mm的地方)。
步骤 9、打开四象限探测器实验软件。(实验软件的操作方法见下)
步骤10、在输入光斑尺寸之后,调整探测器下的侧位移平台,选择一个起始读数作为初始值(沿垂直导轨方向平移),每隔0.5mm记下观测值,和实际值进行线性拟合。
角度测量
步骤1、按照如下光路图,搭建实验光路图。
步骤2、调整氦氖激光器输出光与导轨面平行且居中,使用可变光阑作为高度标志物用来调整激光器与导轨的面的平行。保持此小孔光阑高度不变,做为后续调整标志物。
步骤3、将各光学器件放置在激光器出光口处,调整各器件中心高与激光等高。
步骤4、调整空间滤波器,在调整空间滤波器之前,先去掉针孔,用可变光阑作为高度标志物,当物镜出射的光斑中心目视与小孔光阑对齐时,调节完毕。放入小孔光阑,推动物镜旋钮靠近小孔,推动过程中,不断调整小孔位置使得透射光斑最亮,光通过滤波器后检查射出的光点是最亮的,无衍射条纹,光斑变得均匀时,说明已经调好。
步骤5、使用f=100mm平凸透镜将激光光束准直。
步骤6、将可变光阑放置在准直光束后,滤除光束边缘。
步骤7、放置f=175mm的聚焦平头透镜,
步骤8、将可变光阑调至孔径为4mm。置入偏振分光棱镜,将激光光束分束,调整分光棱镜,使光束从棱镜中心穿过,透射与反射光束垂直,并且与导轨平面平行,此时认为分光棱镜调整完毕。
步骤9、置入![]() 波片,使光束穿过波片中心。
波片,使光束穿过波片中心。
步骤10、在置入反射镜,调整反射镜使光束与反射镜面垂直,使光束处于反射镜的中心位置。
步骤11、置入四象限探测器,使的偏振分光棱镜反射出来的光射在四象限探测器中央,调整探测器到偏振分光棱镜的距离,使光斑尺寸4mm或4mm以下,用钢尺测量探测器的屏到偏振分光棱镜的距离和偏振分光棱镜到反射镜的距离,而这距离之和即为反射镜到探测器的距离,记做D。
步骤12、打开四象限探测器软件,点击“当前置零”之后,在点击“开始记录”之后,旋转反射镜下的旋转台,旋转角度为10'(由于角度测量精度有限,测量范围的限制,建议旋转角度采用10'),点击“停止记录”,记录“当前位置”X的值,即为测试值S。
步骤13、有公式a= ,把测量值S和D带入,与实际转过的角度10'比较。
,把测量值S和D带入,与实际转过的角度10'比较。
软件说明
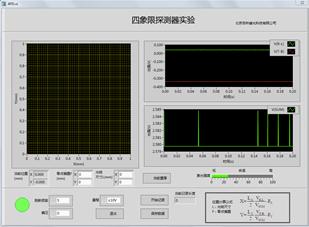
参数说明:
当前位置X、Y:光斑当前坐标;
零点偏置X、Y:实际光斑偏离坐标;
光斑尺寸X、Y:入射光斑大小;
V(R-L):左右象限的光强差;
V(T-B):上下象限的光强差;
V(SUM):整体光斑光强;
量程:测量光强的范围(可通过调整偏振片的角度调节整体光强,保持在绿色区域)。
实验参考数据
位置测量:
光斑尺寸: | 3*3 | 单位: | mm |
实际位移 | 测量位移 | ||
14.00 | 0.000 | 15.05 | 1.091 |
14.05 | 0.060 | 15.10 | 1.114 |
14.10 | 0.128 | 15.15 | 1.146 |
14.15 | 0.186 | 15.20 | 1.174 |
14.20 | 0.242 | 15.25 | 1.200 |
14.25 | 0.308 | 15.30 | 1.221 |
14.30 | 0.368 | 15.35 | 1.247 |
14.35 | 0.426 | 15.40 | 1.268 |
14.40 | 0.481 | 15.45 | 1.287 |
14.45 | 0.540 | 15.50 | 1.303 |
14.50 | 0.595 | 15.55 | 1.313 |
14.55 | 0.655 | 15.60 | 1.320 |
14.60 | 0.708 | 15.65 | 1.330 |
14.65 | 0.753 | 15.70 | 1.339 |
14.70 | 0.800 | 15.75 | 1.347 |
14.75 | 0.855 | 15.80 | 1.354 |
14.80 | 0.906 | ||
14.85 | 0.943 | ||
14.90 | 0.980 | ||
14.95 | 1.013 | ||
15.00 | 1.054 |
红色数据最小二乘法线性拟合
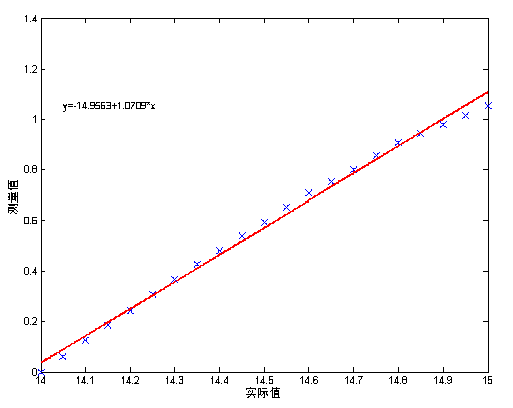
所有数据的最小二乘法拟合:

角度测量:
实际角度 | 0.5°(0.0087) | 1°(0.0175) |
光斑位移 | 1.505 mm | 2.813 mm |
| 0.0062 | 0.0115 |

网友评论 已有 0 条评论,查看更多评论»